
Sterowanie 6-cio osiowym robotem przemysłowym za pomocą interfejsu mózg-komputer.
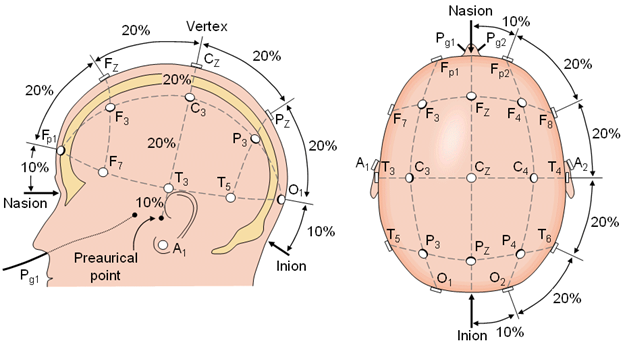
Elektroencefalografia (EEG) to metoda monitorowania elektrofizjologicznego, służąca do rejestrowania aktywności elektrycznej mózgu. Jest nieinwazyjne w której elektrody rozmieszczone są na skórze czaszki. W badaniu EEG rozmieszczenie elektrod nie jest przypadkowa. Najczęściej używanym systemem jest system „10-20”.
Przy zastosowaniu sygnałów pochodzących z EEG oraz 6-cio osiowego robota przemysłowego Mitsubishi RV-12sl przeprowadzono badania pozycjonowania końcówki robota za pomocą interfejsu mózg-komputer. W tym wypadku zadaniem było strącenie górnego kartonika. Dolny kartonik miał pozostać na miejscu.
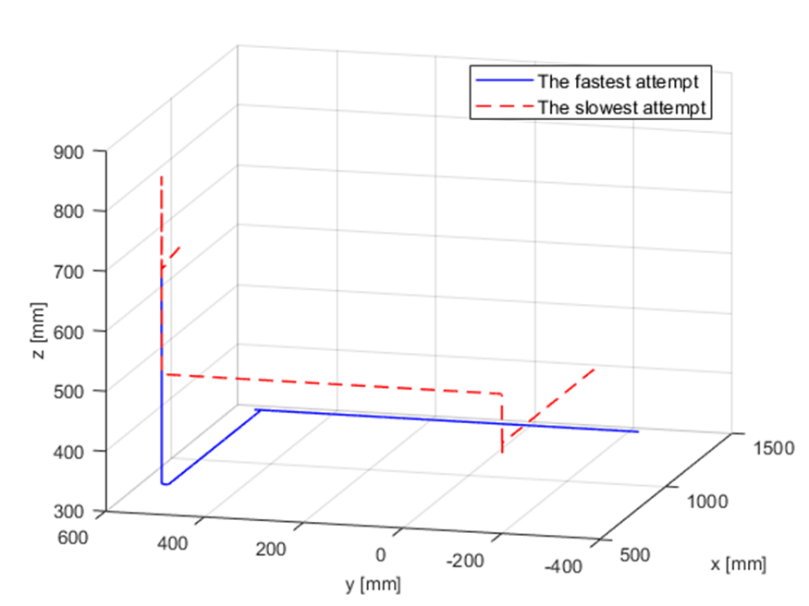
System oparty o EOG w porównaniu do tego opartego o SSVEP posiada wyższy procent prób zakończonych z sukcesem. Ruchy robota są bardziej dynamiczne i ciągłe. EOG pozwala na bardziej precyzyjne ruchy i umożliwia pracę w miejscach mniej dostępnych.